
במדריך הזה אציג את כל שיקולי הבניה של הרובוט שהתחרה במיקרובוטיקון ה#1 ביום שבת האחרון, תחרות רובוטים במשקל 150 גרם. נעבור על הדברים שעבדו טוב ולמה, שלא עבדו טוב ולמה (לדעתי) וקצת שיקולים להמשך.
על התחרות הזו כבר כתבתי בסיקור לא מזמן (לפני התחרות). עכשיו לאחריה, אגיד במשפט שזאת הייתה חוויה מטורפת. שמחה וכאב מהולים מודבקים בחוסן אישי – שמחה על ההצלחה, כאב על העבודה הקשה במפגש עם אי ההצלחה, והכל היה שווה את זה כי למדתי המון, וקיבלתי מהחוויה הזו המון כוח להמשיך ולהשתפר.
על בניה ונהיגה של רובוט שכזה בקרב אפשר לומר המון מילים. המון. במדריך הזה אתרכז בבניית והפעלת הרובוט שלי ספציפית, לצורך התמקדות. בסוף אתייחס גם קצת לקרבות עצמם ולמסקנות שעלו מהניסיון ספציפית לרובוט הזה.
חשוב: אני שנים בתוך עולם האלקטרוניקה והבקרה, כמו שיודע מי שקורא כאן באתר ועוקב אחרי. אבל – וזה אבל גדול – זה הניסיון הראשון שלי בתוך העולם הממוקד הספציפי של קרבות הרובוטים. כל דבר כאן עשיתי עכשיו בפעם הראשונה. הבאתי ניסיון מבחוץ, אבל הרבה ממנו לא היה רלוונטי. אני לא רגיל לבנות דברים שהמטרה שלהם היא להשמיד דברים אחרים בלי להיות מושמד מהם. אולי זה לא נראה כך, אבל זה ממש משמעותי.

unflippable, הרובוט שלי
שיקולים ראשוניים - שיריון וכלי נשק ב150 גרם
150 גרם. זה ממש ממש מעט. וזה אולי מה שעושה את קטגוריית המשקל הזו מורכבת במובנים אחרים מהקטגוריות משקל כבדות יותר. כל גרם משפיע, ברמה שלפעמים אורך החוטים בין הרכיבים הוא שיקול, שלא לדבר על מרכב (שסי) ונשק.
מחשבה – הבחירות הראשונות שתעשו בתכנון הרובוט מן הסתם ישיפעו ויגבילו את האפשרויות שלכם בהמשך התכנון. ומכיוון שקשה לראות את כל המורכבויות לפני, הרבה שיקולים מצטמצמים מהר אחרי הבחירות/בחירה הראשונה.
ועל כן, ואף על פי כן, הבחירה הראשונה שעשיתי, מלראות רובוטים אחרים נבנים מאחורי, היא שיריון. בתוך מגוון כלי הנשק, כלי הנשק שמסתובבים מהר (מאוד) עושים הרבה נזק. והחלטתי לנטרל ככל הניתן את הנזק מהנשקים מהסוג הזה.
מה זמין? חומרים מודפסים בתלת מימד, בבניה עצמית, בגדול חלשים מדי לעמוד בפני נשק מתכת שמסתובב ב50 מטר בשניה בקצה הלהב. הדרך לעשות זאת היא בדרך כלל להשתמש במגני מתכת במקומות הפגיעים. כאן קיבלתי שתי החלטות.
- אני רוצה שיריון מלא. ולכן גם שריון כבד. אני רוצה ככל האפשר להתעלם מהנשקים המסתובבים בתוך הקרב.
- אם יש לי שיריון כבד, הנשק שלי צריך להיות קל. בנוסף נשקים מסתובבים נוטים להסב נזק גם לרובוט עצמו, לא רק ליריב שלו. אם כן, הנשק יהיה נשק קל.
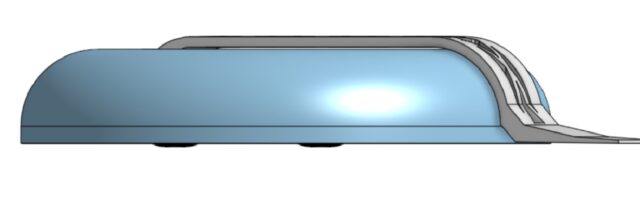
אז למרות שכל הדרך דמיינת את הרובוט כמעיין צלחת הפוכה, לקח לי קצת זמן, לא זוכר מתי, אבל מתי שהוא עלה לי הרעיון ממש להשתמש בצלחת ממש. חיפוש באלי אקספרס הניב צלחות טיטניום, לא פחות, שמשתמשים בהם לטיולים. קניתי שני גדלים. נשארתי עם הצלחת בקוטר 150 מ”מ, במשקל 53 גרם. שריון מלא.

בכוונה הפכתי את התמונה, שתבינו את הקונטקסט
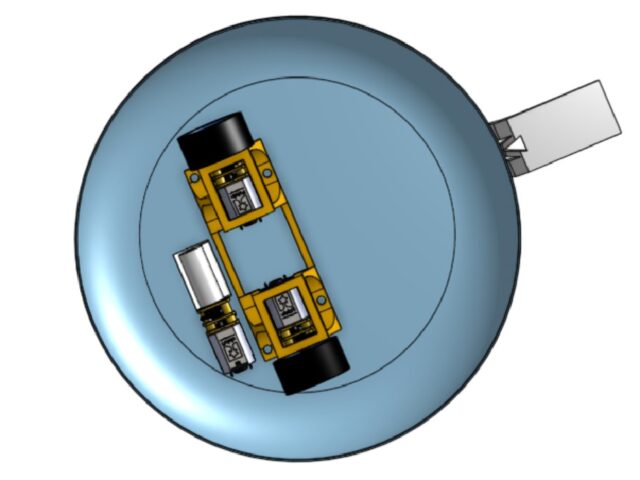
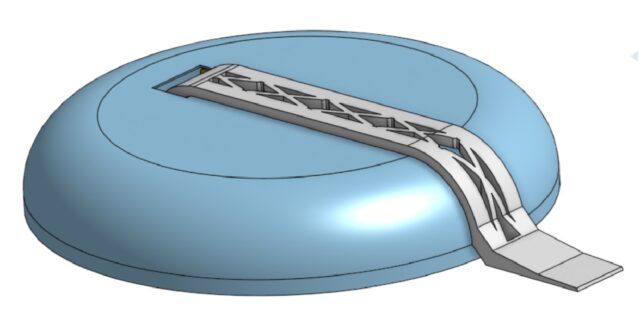
מלמטה ללא האלקטרוניקה
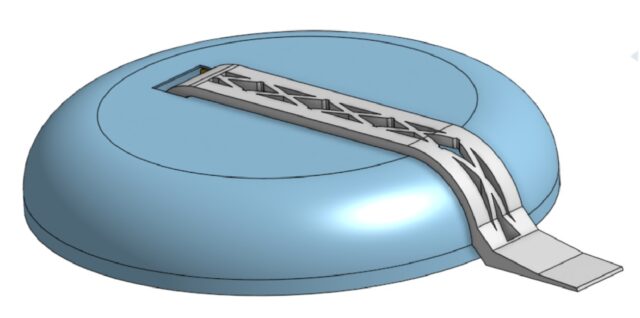
מבנה כללי במודל ה3d
פריסת הרכיבים - תמונה כללית
כאן אפשר לראות את כל הקרביים של הרובוט. מכיוון שהשקעתי כל כך הרבה בשיריון, יחד עם המשקל של כל הרכיבים, לא נשאר שום משקל למגן מלמטה. שזאת לא בעיה כי:
- בקרבות נגד הרובוטים שעשויים היו לעשות נזק משמעותי כשאני על הגב, אף אחד לא הצליח להפוך אותי.
- בקרבות שבהם רובוטים שהצליחו להפוך אותי (הרובוטים ההופכים והדוחפים) לא היה להם כלי שיכול לעשות לי בלאגן בקרביים. ופשוט התהפכתי חזרה.
אז מה רואים כאן? אעשה סקירה רחבה, ואז אכנס לכל קבוצת רכיבים רלוונטית.
- סוללה – סוללה של שני תאים, 7.6v, 300ma.
- משדר/מקלט – (JHEMCU FS2A 4CH AFHDS 2A) מתאים לשלט flysky* שכולם משתמשים בו. סטנדרטי.
- בקר הנעה למנועי מברשות – 10Ax2 דו כיווני ESC 2s-6S.
- מנועי N20 עם תמסורת, מדורגים 300rpm, מחוברים בתושבת מודפסת בPETg (כשאתם קונים שימו לב שאתם מתאימים את המנוע למהירות והמתח הדרושים)
- גלגלים בהכנה עצמית, ליבה מודפסת בתלת מימד וציפוי של סילקון
- בקר מנוע לנשק, פורק ממנוע סרוו 9G
- מנוע נשק, גם N20 רק מדורג 15RPM בלבד (כנראה, זה מה שמדדתי, לא היה כתוב)
- נשק, זרוע מודפסת בתלת מימד בPETg.
- משבת – מפסק רגיל, קל משקל ככל הניתן.
*וכמובן שצריך שלט flysky מתאים (אחרת לא יהיה במה לנהוג)
למודל ב3d כולל הצלחת והקבצים שניתן להדפיס, הלינק הבא (Onshape)
מכיוון שלא היה לי משקל לשחק בו, כל מה שלא היה צריך תושבת הודבק עם דבק מהיר ישירות לצלחת. בעייתי כי זה הופך הכל לחד פעמי, אי אפשר להחליף שום דבר עם הכל מודבק, בטח שלא בין קרב לקרב. עובדה זו גרמה לי לבנות שני רובוטים זהים, ובאמת בקרבות רואים שאני מחליף ביניהם, לפי הרובוט עם הנזק הנמוך ביותר והסוללה המלאה ביותר.
על מה לא אתעכב יותר מפסקה? על הסטנדרט – כברירת מחדל הסט הבסיסי של רובוטים בקטגוריה הזו, היא סוללת שני תאים (7.4v),
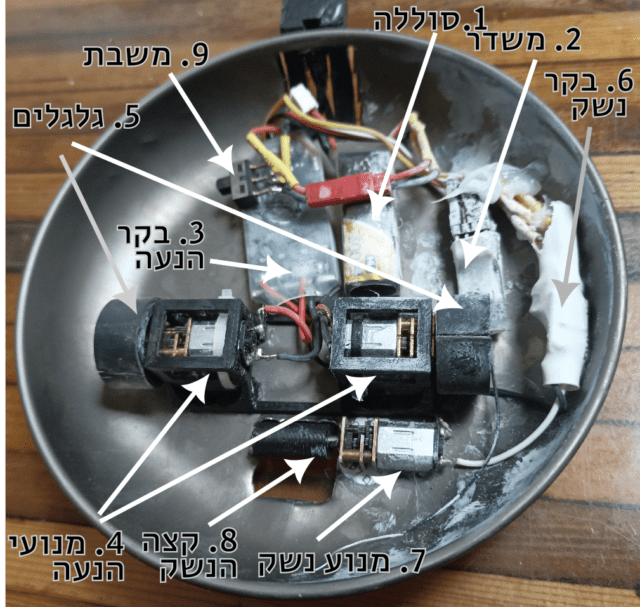
מפת הרכיבים - מודבקים לתחתית הצלחת
מערכת ההנעה
מערכת ההנעה מורכבת משני מנועי N20 שמבצבצים רק 1.5 מ”מ מתחת לשלדה ומאפשרים מגע עם מינימום אפשרות של הרמת הרובוט מהרצפה. אמור להיות מאוד מסובך להרים את הצלחת מהצד (בסוף הflipper היחיד חוץ ממני הצליח לעשות זאת יפה, מה שעלה לי בקרב מולו, כך שצריך עוד לבדוק את העניין הזה).
הגלגלים מודפסים בתלת מימד, ומצופים בחתיכה מצמיד סיליקון (רוחב 12 מ”מ). כל גלגל עם ציפוי הסילקון שוקל 3 גרם.
המבנה שמחזיק אותם במקום גם הוא מודפס בתלת מימד, אני בחרתי בPETg, ויש בו חורים לברגים שבסוף לא השתמשתי בהם, וחור לאזיקון כדי להחזיק את המנועים בפנים. בסוף גם הדבקתי אותם כדי שלא יזוזו בכלל, כי האזיקון לא סיפק אותי.
מעבר לשני הגלגלים, לא היה צריך כלום. המשטח של הזירה חלק מספיק כדי להחליק את הצלחת עליו (ולצורך העניין להרבה מהרובוטים האחרים המודפסים היו רק שני גלגלים).
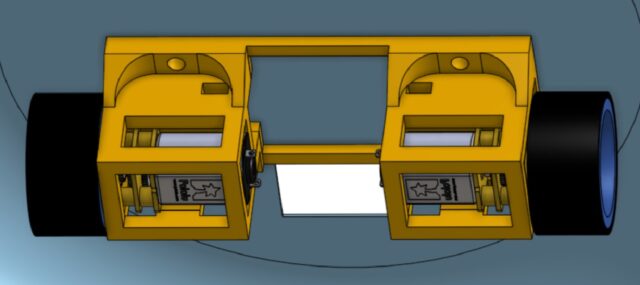
מערכת ההנעה כמו שהיא נראית במודל 3d
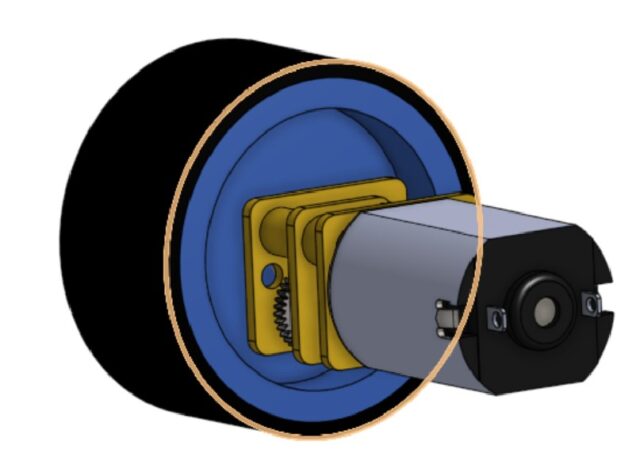
מנוע, גלגל וציפוי סיליקון
אפשר לראות את הגלגלים מבצבצים במילימטר וחצי מלמטה. זה כל מה שצריך
מערכת הנשק
כאן התלבטתי קצת בהתחלה. החלטתי בסוף ללכת על מנוע N20 נוסף, רק עם סל”ד מאוד נמוך, 15 סיבובים לדקה. המנוף מודפס בתלת מימד בPETg גם הוא, ובהתחלה הוא הודפס ללא הדפוס של החורים בו, אבל אז ראיתי שצריך להוריד קצת משקל אז יצא מה שאתם רואים לפניכם.
מכיוון שהמנוע מודבק לשלדה כמו שאפשר לראות במפת הרכיבים למטה, את הכלי אי אפשר לתקן כי אי אפשר להוציא אותו. החור שפתחתי בגג השלדה מתאים בדיוק בשביל התנועה של כלי הנשק, אבל לא להחלפתו.
הבקר לנשק פורק ממנוע servo 9g שלא עבד, על פי המדריך הבא (מאוד פשוט – עשיתי את זה פעמיים, אחד לכל רובוט). סוף סוף היה לי מה לעשות עם כל הservo שלא רציתי לזרוק. זה אדיר שיש מה לעשות איתם.
בהתחלה חשבתי שיהיו לי בעיות עם הגבלות של זרם, אבל זה עבד סבבה לגמרי. בואו נגיד שלא זו הייתה הבעיה שלי בפועל בקרבות.
אז זה עבד יופי, אבל אז הגיע הקרב הזה, הקרב היחיד שעשיתי לפני התחרות עם הרובוט שלימים יקרא Gorbot.
בקרב הזה קרו שני דברים:
- השיריון הוכיח את עצמו מול הHorizontal spinners, הכלים המסתובבים אופקית. חוץ מקצת שריטות השריון עמד בזה יופי.
- מה שכן קרה, הלהב שבר לי קצת מהכלי, ובמצב שבו אני לא יכול להחליף את הכלי בין קרב לקרב זה בעייתי.
ידעתי שאני חייב ליישם פתרון לבעיה הזו, אבל אין לי משקל בכלל להוסיף שום הגנה. שברתי את הראש במשך כמה ימים על איפה אוריד את המשקל הזה כדי להוסיף הגנה לכלי, ואז מצאתי פתרון מצויין.
החלטתי לפתוח חלון קטן בחלק הקדמי שמתחת לכלי, ולכופף אותו לצדדים. כך אחסוך 2-3 גרמים כי לא הוספתי שום חומר אלא רק גרעתי. באחד מהרובוטים (כן, כמו שאמרתי הכנתי שניים) אף הוספתי חיזוקי אלומניום שבאו במקום המשקל שירד, כמו בתמונה שלמטה.
רואים את החורים בדפוס, תפקידם להוריד מעט משקל
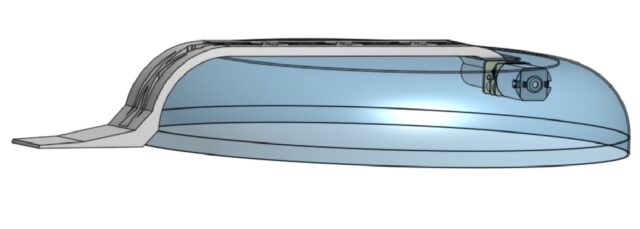
כאן רואים את החיבור עם המנוע דרך השקיפות של הצלחת במודל ה3d

הטריק שאפשר לי להגן על הנשק בעת מנוחה מבלי להוסיף משקל לרובוט
ניסיון ראשון - 3...2...1...
בפועל מתוך 12 רובוטים הגעתי למקום שלישי. 5 קרבות, 3 ראשונים הסתיימו בניצחון שלי, ו2 קרבות בהפסד. אבל כמה מחשבות לפני שאשתף את ה3 דקות התהילה שלי.
- לא השקעתי מספיק בכיול ההיגוי. הייתי לחוץ בזמן לפני הטורניר. אחד מהרובוטים שלי סטה בעקביות ימינה, וההיגוי של הנשק, המנוף, היה לא חכם; בעיה של מיקסינג (שילוב של הפעלת שני ערוצים) גרמה לסיבובים להיות רגישים מדי, ועוד. מה שמביא אותי לסעיף 2.
- אולי כמייקר/ רובוטאי (יש מילה כזו?) יש לי ניסיון רב. אבל לא מעט מהניצחון שייך לנהג. ובזה הניסיון שלי מסתכם באפיזודה לא ארוכה עם מכוניות על שלט אי שם באזור בית הספר היסודי. זה מורכב, ואין לזלזל בזה בכלל.
- העובדה שהכל היה מודבק לשלדה, ושאי אפשר להחליף כלום אלא את הרובוט כולו – זה עניין כואב. לא אחזור על זה. הגרסה הבאה תשלם בשריון ולו כדי שהחלפה תתאפשר. אולי אקטין את הצלחת, או בכלל אתכנן אותו מחדש ללא צלחת. אני לא מצטער על שיריון כבד, אבל זה אולי היה יותר מדי.
זהו בנתיים.
למטה אפשר לראות כמה תמונות יפות ופחות יפות מרגעי הקרבות.
אבל הקרב הזה, הקרב החוזר מול gorbot, הפעם בקרב רשמי בטורניר, היה כל כך מרשים (די במקרה) שגם כשהפסדתי בשני הקרבות הבאים, עדיין הקהל היה איתי והריע לי. משוגע.
זה אמנם מדריך בניה לרובוט, ובכל זאת אני חייב לנצל את הבמה ולומר שנהנתי מהטורניר בצורה לא רגילה, אפילו שהפסדתי. ולמדתי המון. הגירסה הבאה בטוח תהיה טובה יותר.

קצת עבודה בשטח

רגע התהילה - אני מניף את gorbot

אני מנסה להפוך את rockbot הרובוט של לא פחות מהבן שלי... קרב ראשון של שנינו (קשוח...)

רגע קצת פחות נחמד מהקרב נגד kirchoo

מההפסד השני שלי - נגד מונוסודיום

רגע קצת פחות נחמד מהקרב נגד kirchoo





לתוכן זה נכתבו 0 תגובות